ROS中的tf坐标系管理系统
sudo apt-get install ros-noetic-turtle-tf
roslaunch turtle_tf turtle_tf_demo.launch
报错因为python3,把/opt/ros/noetic/lib/turtle_tf的py文件都改改成呢#!/usr/bin/env python3
yys@yys:/opt/ros/noetic/lib/turtle_tf$ ls
dynamic_tf_broadcaster.py turtle_tf_broadcaster turtle_tf_listener turtle_tf_listener.py turtle_tf_message_broadcaster.py
fixed_tf_broadcaster.py turtle_tf_broadcaster.py turtle_tf_listener_debug turtle_tf_listener_wait.py turtle_tf_message_filter
下面成功了,在这个窗口控制方向,第二只乌龟会追随第一只
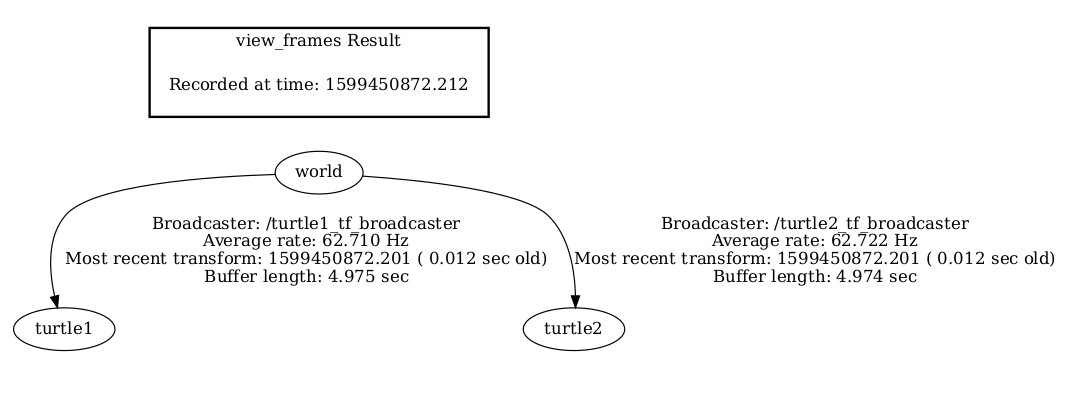
导出原理图框架
rosrun tf view_frames
如果报错
Listening to /tf for 5.0 seconds
Done Listening
b'dot - graphviz version 2.43.0 (0)\n'
Traceback (most recent call last):
File "/opt/ros/noetic/lib/tf/view_frames", line 119, in <module>
generate(dot_graph)
File "/opt/ros/noetic/lib/tf/view_frames", line 89, in generate
m = r.search(vstr)
TypeError: cannot use a string pattern on a bytes-like object
修改/opt/ros/noetic/lib/tf/view_frames第89行
sudo vim /opt/ros/noetic/lib/tf/view_frames
m = r.search(vstr.decode('utf-8'))
成功结果
yys@yys:~$ rosrun tf view_frames
Listening to /tf for 5.0 seconds
Done Listening
b'dot - graphviz version 2.43.0 (0)\n'
Detected dot version 2.43
frames.pdf generated
②命令行工具
查看两只乌龟坐标变换
rosrun tf tf_echo turtle1 turtle2
yys@yys:~$ rosrun tf tf_echo turtle1 turtle2
At time 1599451729.505
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.280, 0.960] #四元素
in RPY (radian) [0.000, -0.000, 0.567] #弧度
in RPY (degree) [0.000, -0.000, 32.469] # 角度
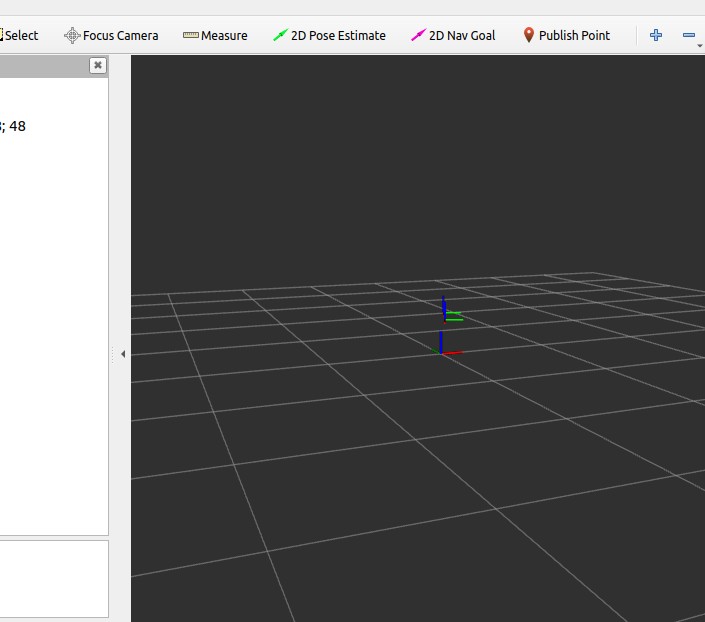
③可视化工具
rosrun rviz rviz -d `rospack find turtle_tf`/rviz/turtle_rviz.rviz
首先新建一个文件夹
cd ~/catkin_ws/src
catkin_create_pkg learning_tf roscpp rospy tf turtlesim
①python 实现
/home/yys/catkin_ws/src/learning_tf/script/turtle_tf_broadcaster.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# 该例程将请求/show_person服务,服务数据类型learning_service::Person
import roslib
roslib.load_manifest('learning_tf')
import rospy
import tf
import turtlesim.msg
def handle_turtle_pose(msg, turtlename):
br = tf.TransformBroadcaster()
br.sendTransform((msg.x, msg.y, 0),
tf.transformations.quaternion_from_euler(0, 0, msg.theta),
rospy.Time.now(),
turtlename,
"world")
if __name__ == '__main__':
rospy.init_node('turtle_tf_broadcaster')
turtlename = rospy.get_param('~turtle') # 获取海龟的名字(turtle1,turtle2)
rospy.Subscriber('/%s/pose' % turtlename,
turtlesim.msg.Pose,
handle_turtle_pose,
turtlename)
rospy.spin()
/home/yys/catkin_ws/src/learning_tf/script/turtle_tf_listener.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# 该例程将请求/show_person服务,服务数据类型learning_service::Person
import roslib
roslib.load_manifest('learning_tf')
import rospy
import math
import tf
import geometry_msgs.msg
import turtlesim.srv
if __name__ == '__main__':
rospy.init_node('turtle_tf_listener')
listener = tf.TransformListener()
rospy.wait_for_service('spawn')
spawner = rospy.ServiceProxy('spawn', turtlesim.srv.Spawn)
spawner(4, 2, 0, 'turtle2')
turtle_vel = rospy.Publisher('turtle2/cmd_vel', geometry_msgs.msg.Twist,queue_size=1)
rate = rospy.Rate(10.0)
while not rospy.is_shutdown():
try:
(trans,rot) = listener.lookupTransform('/turtle2', '/turtle1', rospy.Time(0))
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
continue
angular = 4 * math.atan2(trans[1], trans[0])
linear = 0.5 * math.sqrt(trans[0] ** 2 + trans[1] ** 2)
cmd = geometry_msgs.msg.Twist()
cmd.linear.x = linear
cmd.angular.z = angular
turtle_vel.publish(cmd)
rate.sleep()
②c++实现
/home/yys/catkin_ws/src/learning_tf/script/turtle_tf_broadcaster.cpp
/**
* 该例程产生tf数据,并计算、发布turtle2的速度指令
*/
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <turtlesim/Pose.h>
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// 创建tf的广播器
static tf::TransformBroadcaster br;
// 初始化tf数据
tf::Transform transform;
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
transform.setRotation(q);
// 广播world与海龟坐标系之间的tf数据
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_broadcaster");
// 输入参数作为海龟的名字
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
}
turtle_name = argv[1];
// 订阅海龟的位姿话题
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
};
/home/yys/catkin_ws/src/learning_tf/script/turtle_tf_listener.cpp
/**
* 该例程监听tf数据,并计算、发布turtle2的速度指令
*/
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_listener");
// 创建节点句柄
ros::NodeHandle node;
// 请求产生turtle2
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
// 创建发布turtle2速度控制指令的发布者
ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("/turtle2/cmd_vel", 10);
// 创建tf的监听器
tf::TransformListener listener;
ros::Rate rate(10.0);
while (node.ok())
{
// 获取turtle1与turtle2坐标系之间的tf数据
tf::StampedTransform transform;
try
{
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);
}
catch (tf::TransformException &ex)
{
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
// 根据turtle1与turtle2坐标系之间的位置关系,发布turtle2的速度控制指令
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
cd ~/catkin_ws
catkin_make
roscore
rosrun turtlesim turtlesim_node
rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf_broadcaster /turtle2
rosrun learning_tf turtle_tf_listener
rosrun turtlesim turtle_teleop_key
launch运行方法,点击查看
本文作者: 永生
本文链接: https://yys.zone/detail/?id=113
版权声明: 本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明出处!
评论列表 (0 条评论)