arduino 的python控制小车实践探索
python控制小车
python控制小车代码1
vim car.ino
1.控制小车+超声波测距
电源一个gnd,一个A0,
一个EchoPinA1,一个TrigPinA2
int enA = 11;
int in1 = 7;
int in2 = 8;
// motor two
int enB = 6;
int in3 = 9;
int in4 = 10;
char var;
//超声波测距
unsigned int EchoPin = A1;
unsigned int TrigPin = A2;
unsigned long Time_Echo_us = 0;
//Len_mm_X100 = length*100
unsigned long Len_mm_X100 = 0;
unsigned long Len_Integer = 0; //
unsigned int Len_Fraction = 0;
void setup()
{
Serial.begin(57600);
// set all the motor control pins to outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
pinMode(A0,OUTPUT);
digitalWrite(A0,HIGH);
pinMode(EchoPin, INPUT);
pinMode(TrigPin, OUTPUT);
}
void go()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// set speed to 255 out of possible range 0~255
// turn on motor B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// set speed to 255 out of possible range 0~255
analogWrite(enA, 255);
analogWrite(enB, 255);
}
void back()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// set speed to 200 out of possible range 0~255
// turn on motor B
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// set speed to 200 out of possible range 0~255
analogWrite(enA, 255);
analogWrite(enB, 255);
}
void left()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// set speed to 200 out of possible range 0~255
// turn on motor B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// set speed to 200 out of possible range 0~255
analogWrite(enA, 255);
analogWrite(enB, 255);
delay(20);
}
void right()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// set speed to 200 out of possible range 0~255
// turn on motor B
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// set speed to 200 out of possible range 0~255
analogWrite(enA, 255);
analogWrite(enB, 255);
}
void off()
{
// now turn off motors
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop()
{
while(Serial.available()>0)
{
var=Serial.read();
if (var == '0')
{
off();
}
if (var == '1')
{
go();
}
if (var == '2')
{
back();
}
if (var == '3')
{
left();
}
if (var == '4')
{
right();
}
}
//超声波测距
digitalWrite(TrigPin, HIGH);
delayMicroseconds(50);
digitalWrite(TrigPin, LOW);
Time_Echo_us = pulseIn(EchoPin, HIGH);
if((Time_Echo_us < 60000) && (Time_Echo_us > 1))
{
Len_mm_X100 = (Time_Echo_us*34)/2;
Len_Integer = Len_mm_X100/100;
Len_Fraction = Len_mm_X100%100;
Serial.print("Present Length is: ");
Serial.print(Len_Integer, DEC);
Serial.print(".");
if(Len_Fraction < 10)
Serial.print("0");
Serial.print(Len_Fraction, DEC);
Serial.println("mm");
}
}
2.不带加速的(只控制小车,力量大)
int enA = 11;
int in1 = 7;
int in2 = 8;
// motor two
int enB = 6;
int in3 = 9;
int in4 = 10;
char var;
void setup()
{
Serial.begin(57600);
// set all the motor control pins to outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void go()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// set speed to 255 out of possible range 0~255
// turn on motor B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// set speed to 255 out of possible range 0~255
analogWrite(enA, 255);
analogWrite(enB, 255);
}
void back()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// set speed to 200 out of possible range 0~255
// turn on motor B
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// set speed to 200 out of possible range 0~255
analogWrite(enA, 255);
analogWrite(enB, 255);
}
void left()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// set speed to 200 out of possible range 0~255
// turn on motor B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// set speed to 200 out of possible range 0~255
analogWrite(enA, 255);
analogWrite(enB, 255);
delay(20);
}
void right()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// set speed to 200 out of possible range 0~255
// turn on motor B
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// set speed to 200 out of possible range 0~255
analogWrite(enA, 255);
analogWrite(enB, 255);
}
void off()
{
// now turn off motors
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop()
{
while(Serial.available()>0)
{
var=Serial.read();
if (var == '0')
{
off();
}
if (var == '1')
{
go();
}
if (var == '2')
{
back();
}
if (var == '3')
{
left();
}
if (var == '4')
{
right();
}
}
}
读取是
ser.readline().decode('utf-8')
3.带加速的(力量小)
car.ino
int enA = 11;
int in1 = 7;
int in2 = 8;
// motor two
int enB = 6;
int in3 = 9;
int in4 = 10;
char var;
void setup()
{
Serial.begin(57600);
// set all the motor control pins to outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void go()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// set speed to 200 out of possible range 0~255
// turn on motor B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// set speed to 200 out of possible range 0~255
for (int i = 100; i < 256; i++)
{
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
}
void back()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// set speed to 200 out of possible range 0~255
// turn on motor B
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// set speed to 200 out of possible range 0~255
for (int i = 100; i < 256; i++)
{
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
}
void left()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// set speed to 200 out of possible range 0~255
// turn on motor B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// set speed to 200 out of possible range 0~255
for (int i = 100; i < 256; i++)
{
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
}
void right()
{
// this function will run the motors in both directions at a fixed speed
// turn on motor A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// set speed to 200 out of possible range 0~255
// turn on motor B
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// set speed to 200 out of possible range 0~255
for (int i = 100; i < 256; i++)
{
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
}
void off()
{
// now turn off motors
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop()
{
while(Serial.available()>0)
{
var=Serial.read();
if (var == '0')
{
off();
}
if (var == '1')
{
go();
}
if (var == '2')
{
back();
}
if (var == '3')
{
left();
}
if (var == '4')
{
right();
}
}
}
2.python代码 python控制小车代码2
import time
import serial # 导入串口通讯库
ser = serial.Serial("com5", 57600, timeout=1)
demo0 = b"0"
demo1 = b"1"
demo2 = b"2"
demo3 = b"3"
i = 0
# 要延长时间才能控制
time.sleep(3)
ser.write(demo0)
python控制小车linux版
import time
import sys
import serial # 导入串口通讯库
import threading
import os
ser = serial.Serial("/dev/ttyUSB0", 57600, timeout=0.2)
demo0 = b"0"
demo1 = b"1"
demo2 = b"2"
demo3 = b"3"
demo4 = b"4"
# 要延长时间才能控制
time.sleep(1)
ips = sys.argv[1]
def speak(text):
"""说话线程"""
os.system("espeak -v zh '%s'" % text) # 使用os来文字转语音
print(ips)
if ips == "0":
threading.Thread(target=speak, args=("停止",)).start()
ser.write(demo0)
if ips == "1":
threading.Thread(target=speak, args=("前进",)).start()
ser.write(demo1)
time.sleep(3)
if ips == "2":
threading.Thread(target=speak, args=("后退",)).start()
ser.write(demo2)
time.sleep(3)
if ips == "3":
threading.Thread(target=speak, args=("左拐:",)).start()
ser.write(demo3)
time.sleep(1)
if ips == "4":
threading.Thread(target=speak, args=("右拐:",)).start()
ser.write(demo4)
time.sleep(1)
ser.write(demo0)
如果缺少serial安装pyserial不是serial
pip3 install pyserial
第一种:按厘米
int TrgPin = 7;
int EcoPin = 6;
float dist;
void setup()
{
Serial.begin(9600);
//设置TrgPin为输出状态
pinMode(TrgPin, OUTPUT);
// 设置EcoPin为输入状态
pinMode(EcoPin, INPUT);
}
void loop()
{
digitalWrite(TrgPin, LOW);
delayMicroseconds(8);
digitalWrite(TrgPin, HIGH);
// 维持10毫秒高电平用来产生一个脉冲
delayMicroseconds(10);
digitalWrite(TrgPin, LOW);
// 读取脉冲的宽度并换算成距离
dist = pulseIn(EcoPin, HIGH) / 58.00;
Serial.print("Distance:");
Serial.print(dist);
Serial.println("cm");
delay(300);
}
第二种,按毫米
unsigned int EchoPin = 6;
unsigned int TrigPin = 7;
unsigned long Time_Echo_us = 0;
//Len_mm_X100 = length*100
unsigned long Len_mm_X100 = 0;
unsigned long Len_Integer = 0; //
unsigned int Len_Fraction = 0;
void setup()
{
Serial.begin(9600);
pinMode(EchoPin, INPUT);
pinMode(TrigPin, OUTPUT);
}
void loop()
{
digitalWrite(TrigPin, HIGH);
delayMicroseconds(50);
digitalWrite(TrigPin, LOW);
Time_Echo_us = pulseIn(EchoPin, HIGH);
if((Time_Echo_us < 60000) && (Time_Echo_us > 1))
{
Len_mm_X100 = (Time_Echo_us*34)/2;
Len_Integer = Len_mm_X100/100;
Len_Fraction = Len_mm_X100%100;
Serial.print("Present Length is: ");
Serial.print(Len_Integer, DEC);
Serial.print(".");
if(Len_Fraction < 10)
Serial.print("0");
Serial.print(Len_Fraction, DEC);
Serial.println("mm");
}
delay(300);
}
可以一个做gnd一个做5v电压,一个低电平一个高电平,注意电流只有40ma
void setup() {
// put your setup code here, to run once:
pinMode(5,OUTPUT);
pinMode(6,OUTPUT);
digitalWrite(5,HIGH);
digitalWrite(6,LOW);
}
void loop() {
// put your main code here, to run repeatedly:
}
/*
HC-06-Serial-LED-demo
by 太极创客(2017-07-08)
www.taici-maker.com
此程序旨在演示如何利用HC-06蓝牙模块通过手机或平板电脑的
蓝牙功能来打开和关闭arduino开发板引脚11上连接的LED。
如需获得更多关于本程序的使用说明,请参见太极创客制作的《零基础入门学用Arduino》教程。
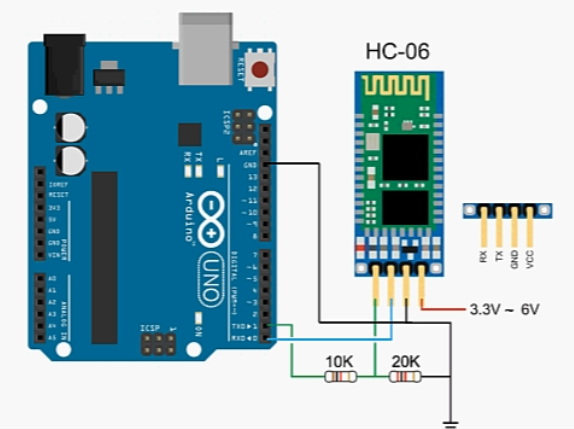
---- 电路连接 ----
HC-06 Arduino Uno R3 引脚
TX 0 (RX)
RX 1 (TX)
VCC +5v
GND GND
注意:
1. 须使用分压电路,确保HC-06 RX信号电压为3.3伏特。
2. 须先将此程序上传至ARDUINO后,再将HC-06连接在ARDUINO开发板的串口引脚上。
否则程序将无法正常上传。
*/
char serialData;
void setup() {
Serial.begin(9600);
pinMode(11, OUTPUT); //11引脚连接演示用LED
}
void loop(){
serialData = Serial.read();
Serial.println(Serial.available());
if( Serial.available()>0 ){
if (serialData == '1' ) { //接收到点亮LED指令
Serial.print("Got command: "); Serial.println(serialData);
Serial.println("LED-ON");
digitalWrite(11, HIGH); //点亮LED指令
} else { //接收到熄灭LED指令
Serial.print("Got command: ");
Serial.println(serialData);
Serial.println("LED-OFF");
digitalWrite(11, LOW); //熄灭LED指令
}
}
}
手机蓝牙配对hc-06默认密码1234
已知问题Serial.available()一直是0
下载Arduino bluetooth controller密码:yyss,可以连接switch mode
本文作者: 永生
本文链接: https://yys.zone/detail/?id=171
版权声明: 本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明出处!
评论列表 (0 条评论)